Micropython——ESP32使用
目录
警告
本文最后更新于 2024-05-23,文中内容可能已过时。
Pin引脚类的应用
|
|
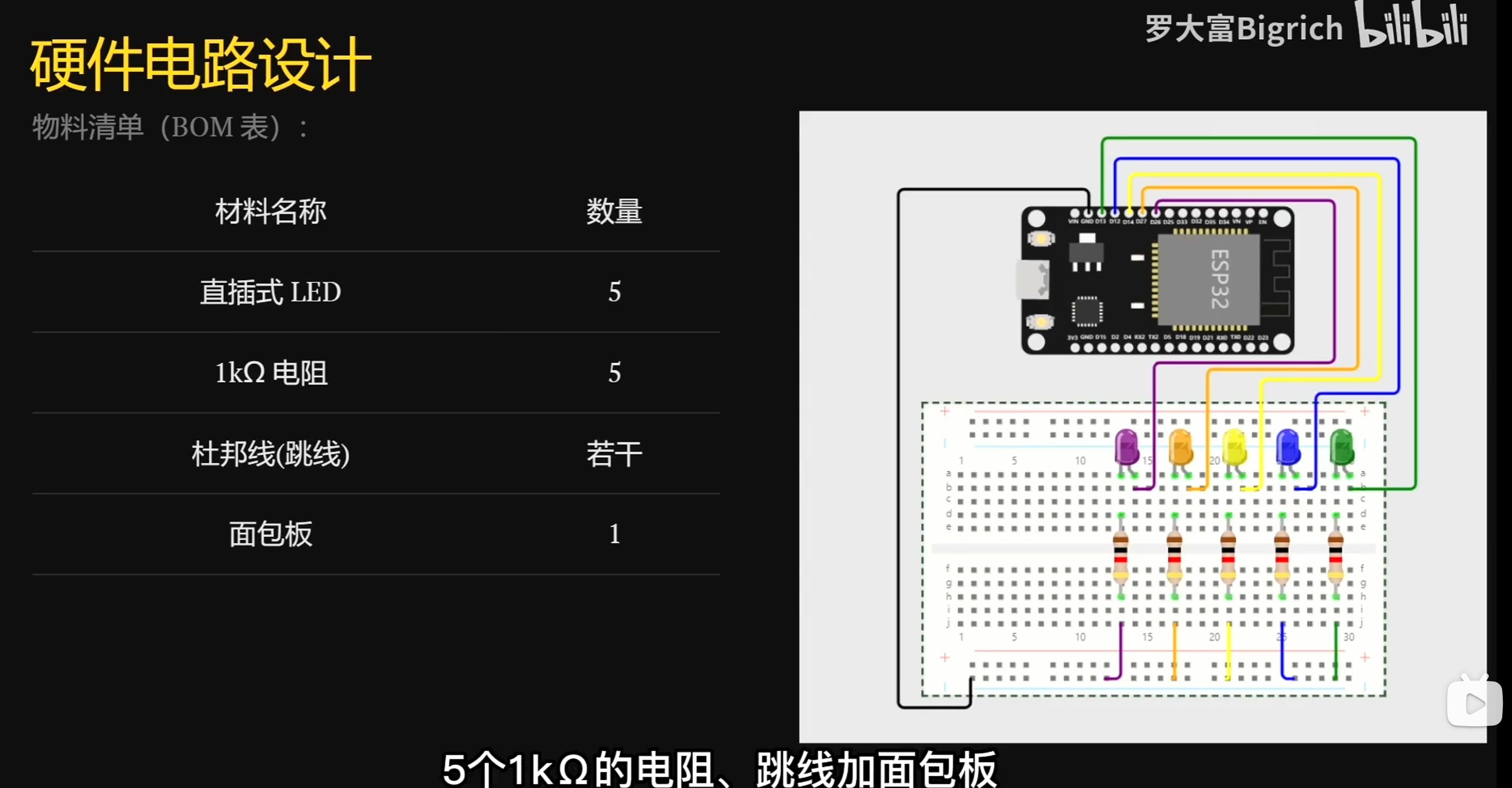
软件设计1-点亮一个LED
|
|
软件设计2-闪烁的LED
|
|
软件设计3-流水灯
|
|
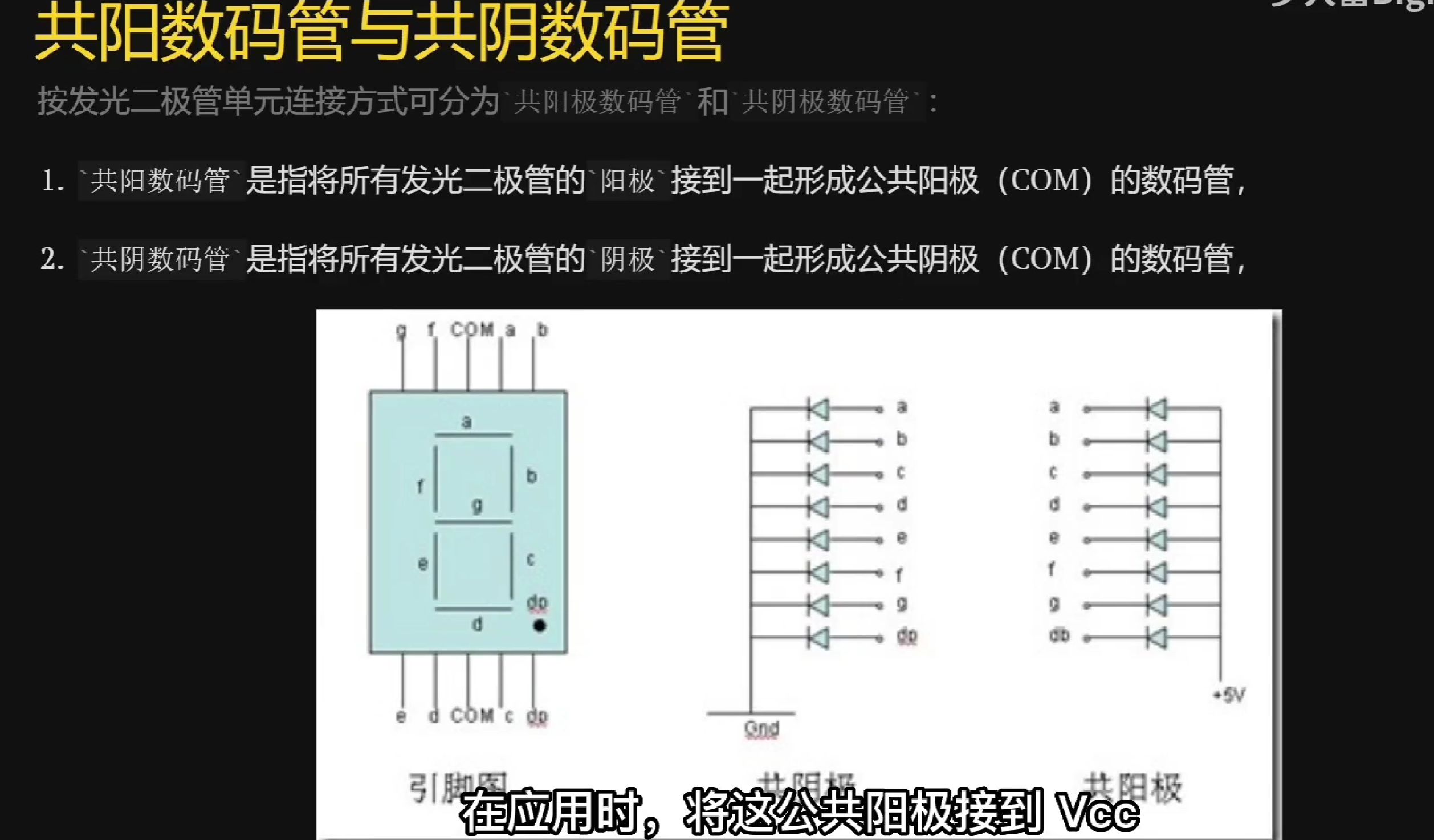
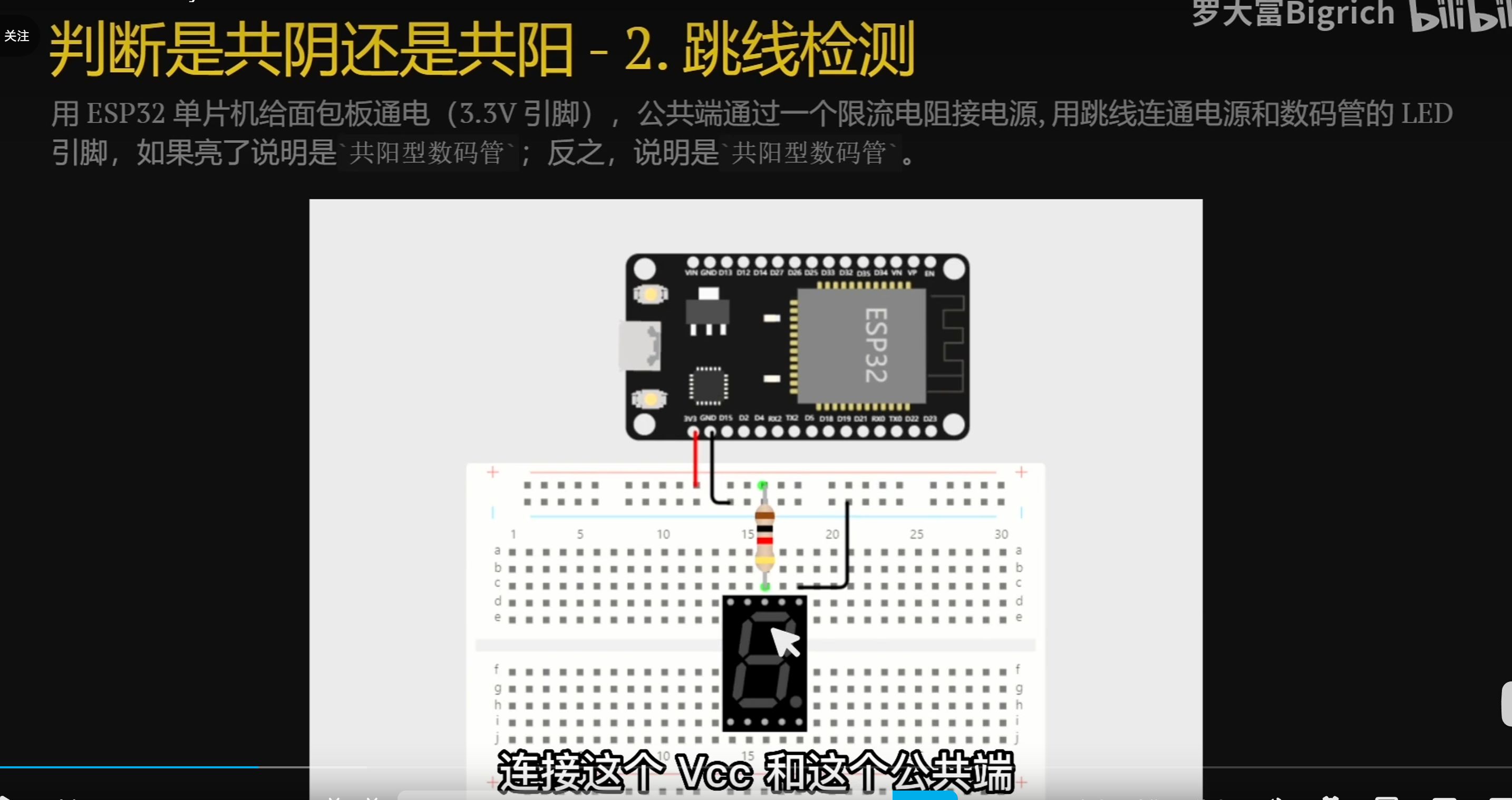
软件设计3-数码管显示

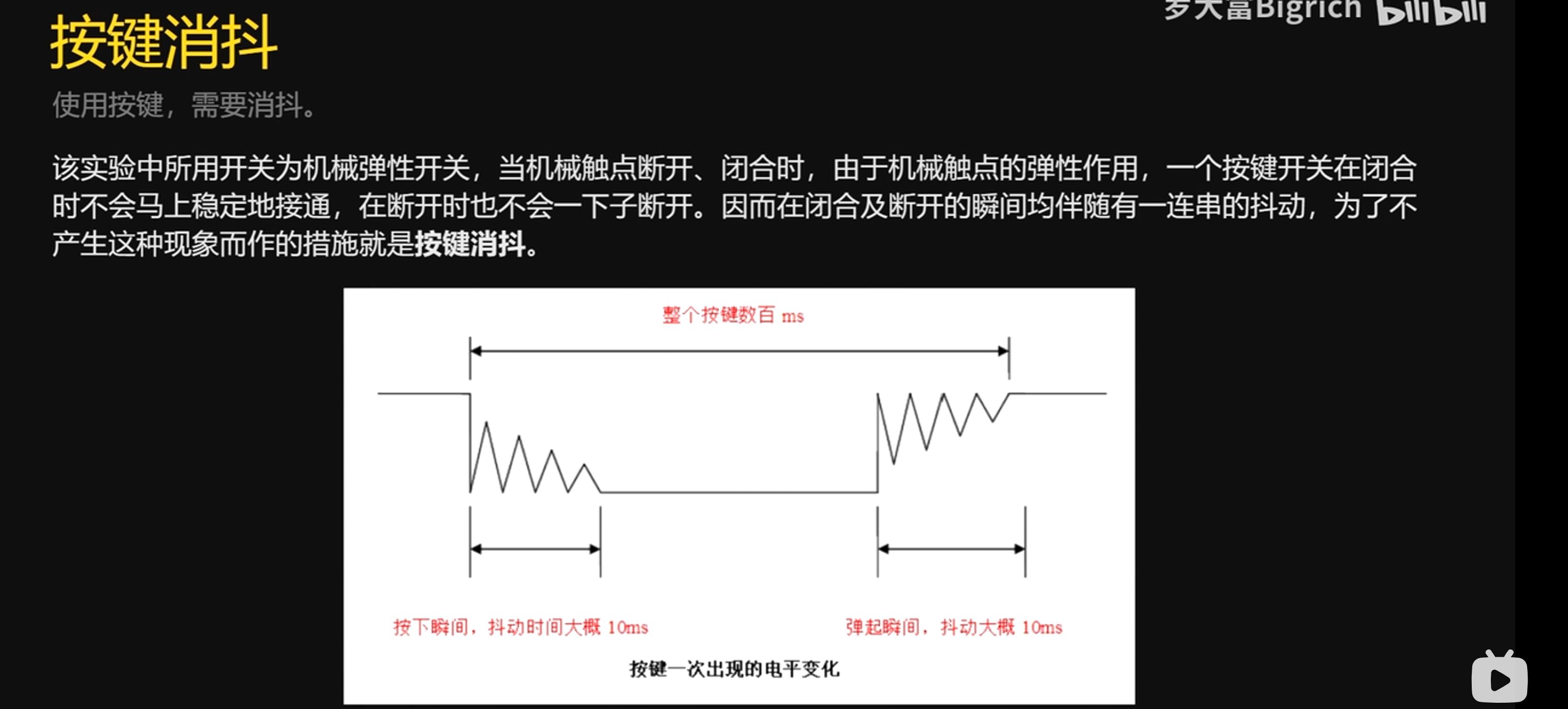
按键消抖
|
|
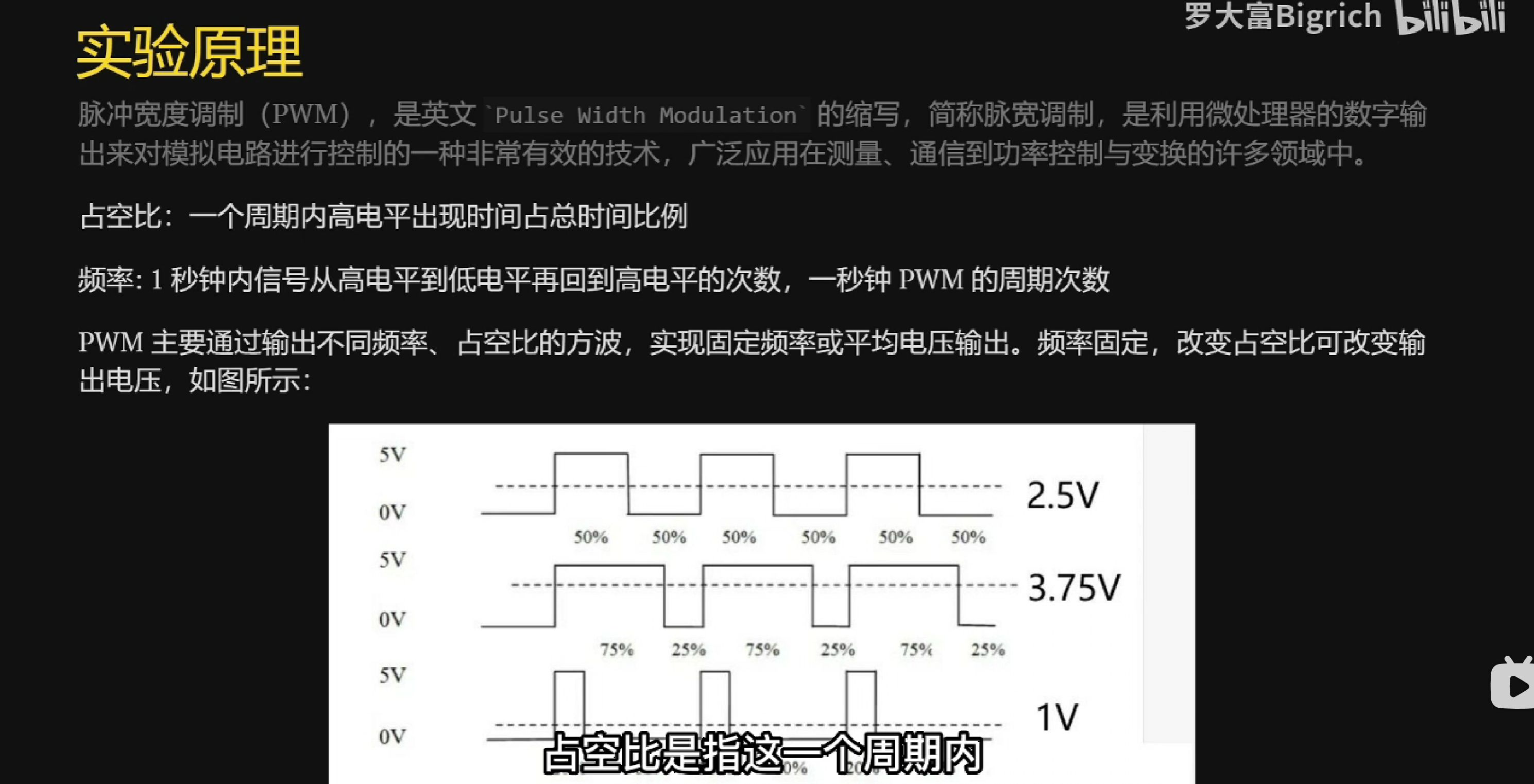
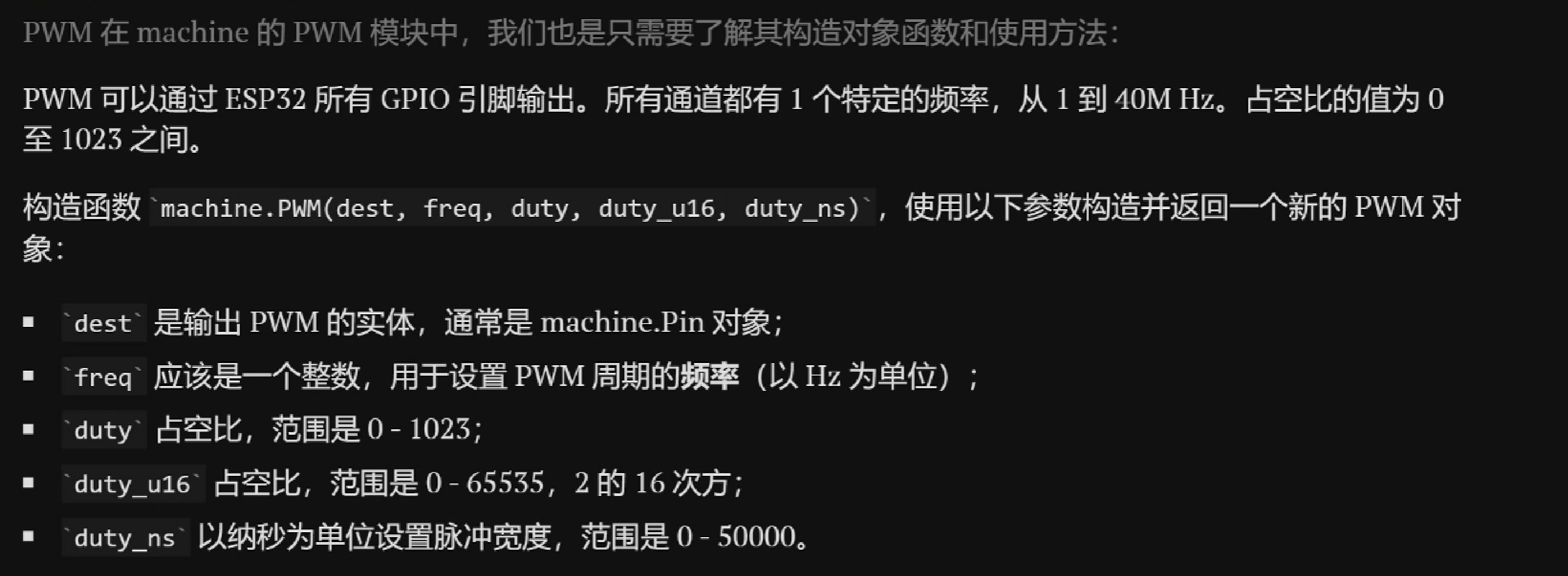
PWM
PWM 呼吸灯
|
|
呼吸灯代码:
|
|
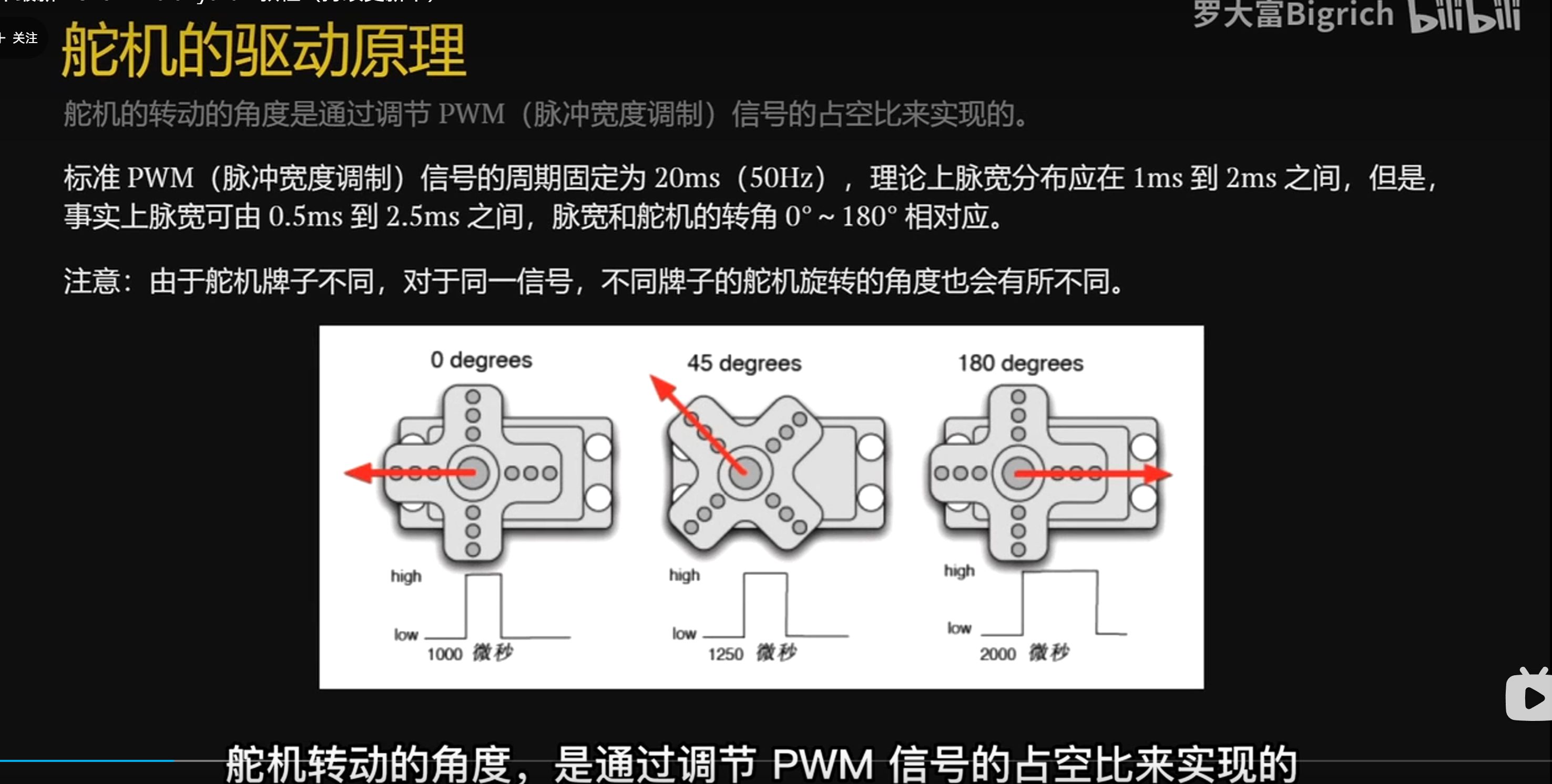
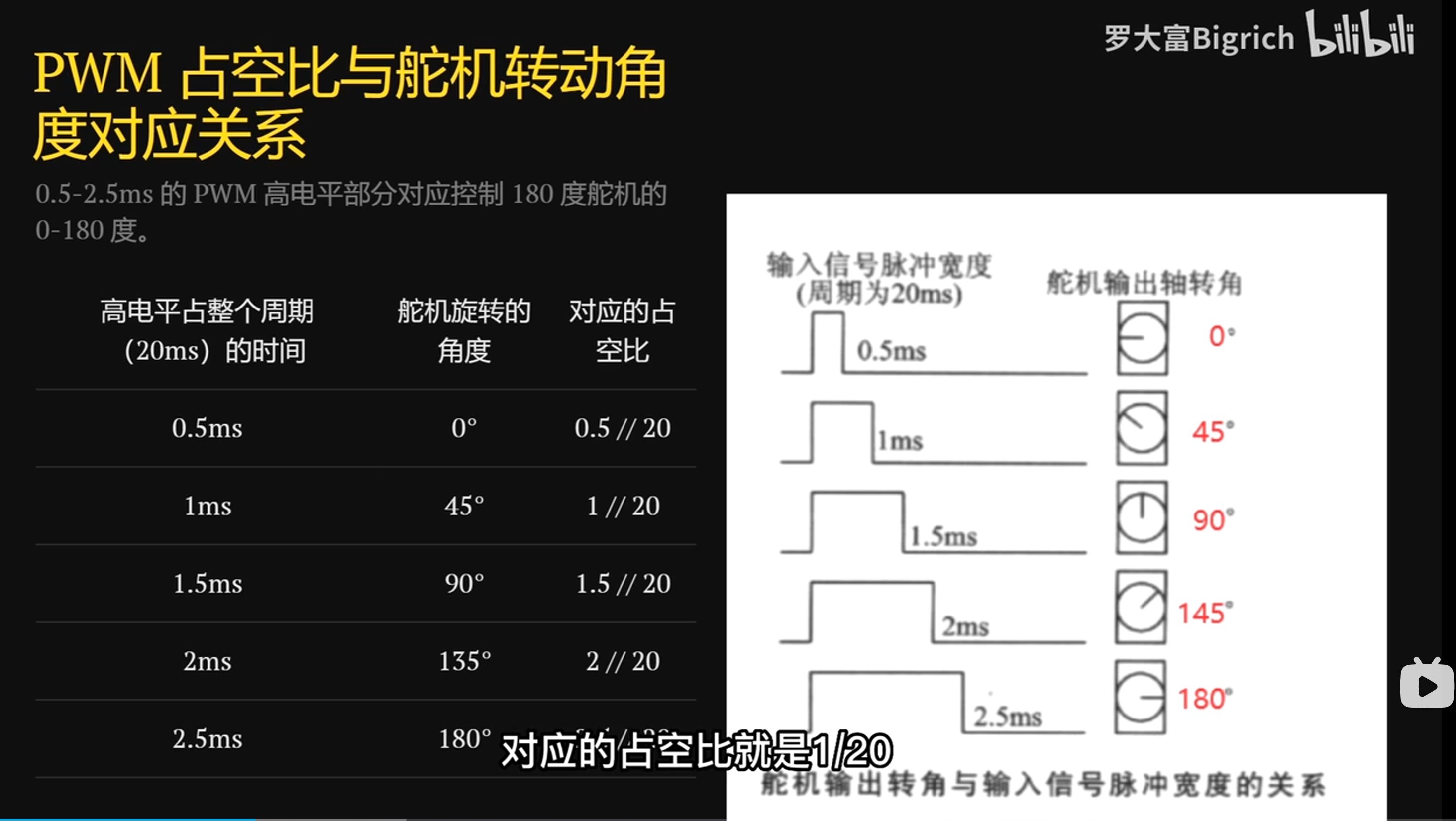
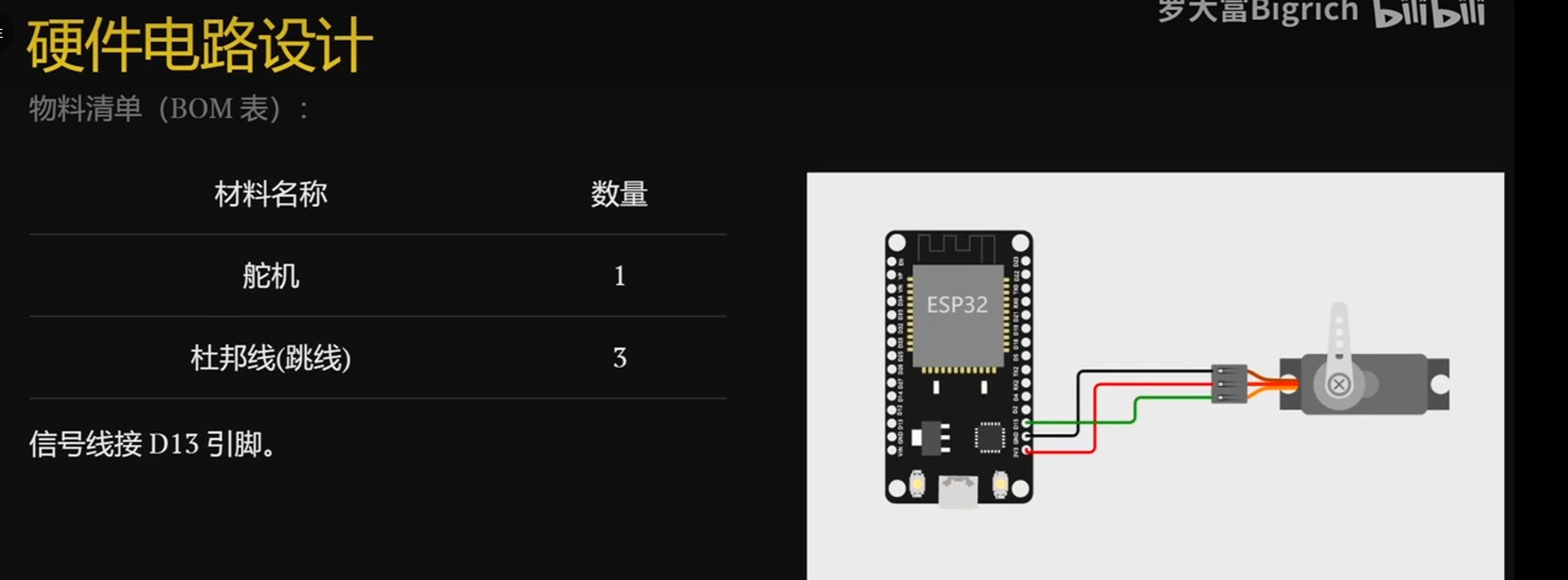
PWM 控制舵机
下面是舵机的驱动原理
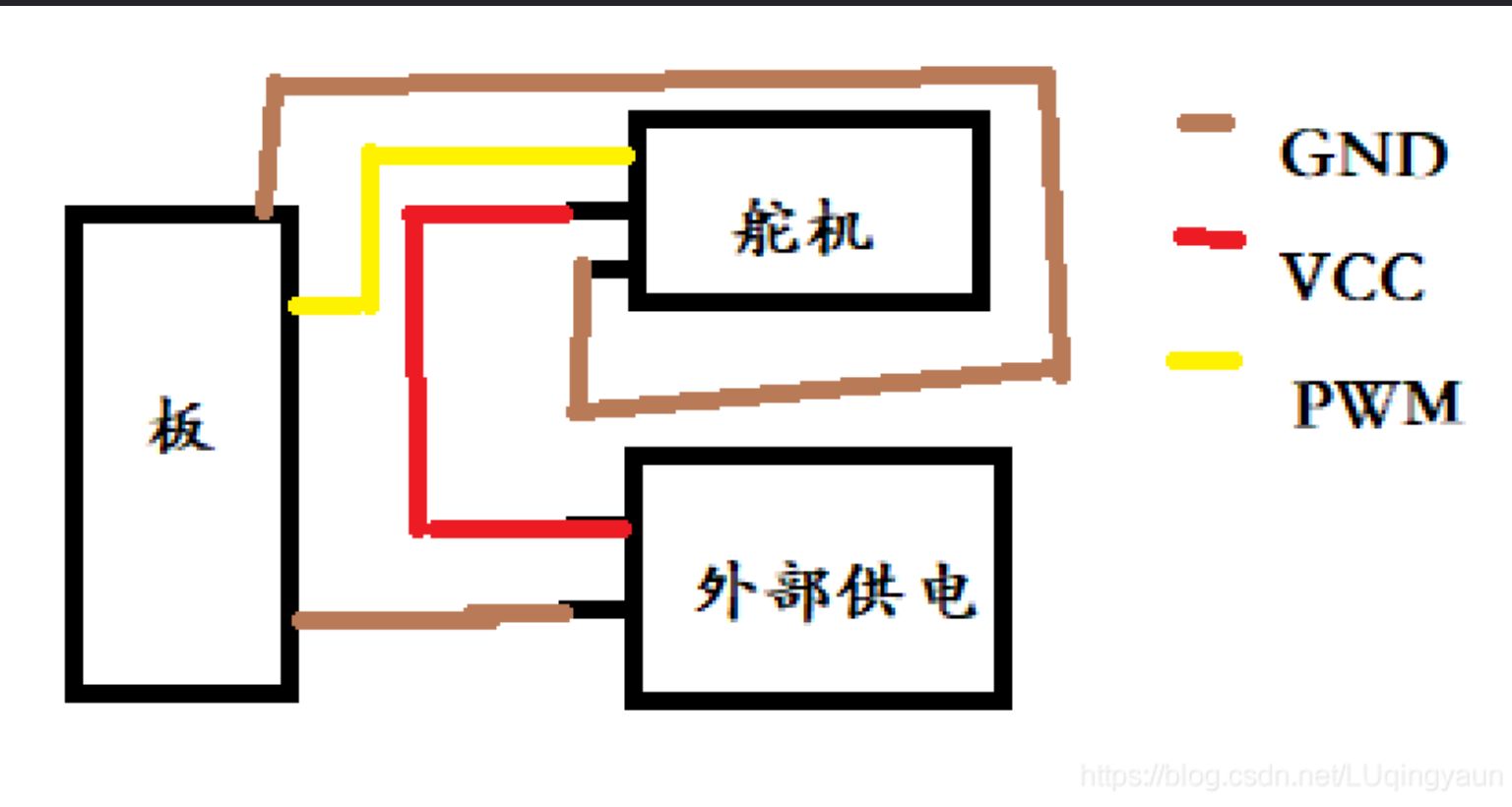
注意:舵机单独供电,要和单片机共地
|
|